Multi Agent TurtleBot
October 2024 - December 2024
Overview
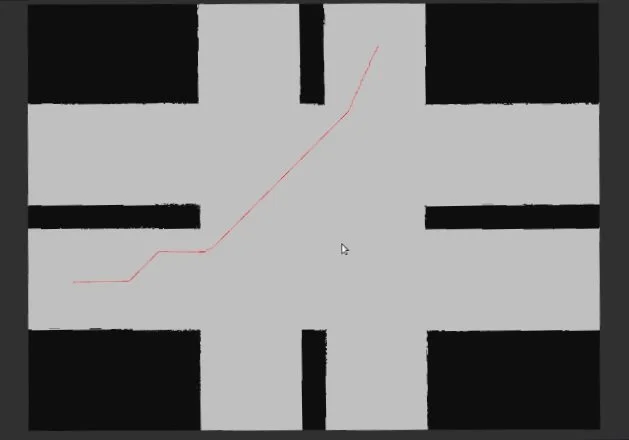
The goal of this project was to design an autonomous driving TurtleBot that predicts the trajectories of other agents, then plan and execute trajectories to reach a target while avoiding collisions with other agents. Moreover, the TurtleBot would navigate on an image of the road and avoid colliding with the pavement. This project integrated multiple areas of robotics including perception, behavior prediction, motion planing and control theory.
My Contribution
I mainly worked on the path planning and control systems. Our path-planning system used the A* algorithim to find an optimal path within a specified time frame. The A* method utilizes dynamic programming to minimize control costs over a task horizon, considering terminal and stage costs. A heuristic function estimates the cost to the goal, guiding the search towards the more promising routes. The path was computed using Python and was published as a path message to the “/trajectory” topic, where it integrates with a PID controller for execution.